Projekt "Nemo" - Stavba quadcoptery
Re: Projekt "Nemo" - Stavba quadcoptery
Pokud by byli motory blokované, tak by regulátor zapípal ne?
Re: Projekt "Nemo" - Stavba quadcoptery
jakub.cr píše:Pokud by byli motory blokované, tak by regulátor zapípal ne?
ano, měly by pípat tak či tak
zkoušel jsi připojit desku bez regulátorů (pouze s jedním kvůli napájení přes BEC) s PC? Jestli senzory reagovaly?
Pak zkus připojit jeden regulátor k příjmači na kanál plynu a zkus jestli zapípá a jestli se roztočí
Taranis SE, Optic 6 Assan, Toro900, MAXI SWIFT, FW-190, PZ BF-109
Re: Projekt "Nemo" - Stavba quadcoptery
Sorry, s tím Spektrumem nevím jak se mi to tam dostalo. Asi už mám vidiny. Z nějakého důvodu jsem si myslel že máš Spektrum DX5. Omluva.
Protože ti nepípají regly, tak bych hledal problém u nich. Každý regulátor bys měl ještě naučit rozsah plynu tvé vysílačky. Já to dělal tak že jsem si vzal přijímač, ve vysílačce mrknul na kterém kanálu mám plyn a do toho zapojil regulátor připojený na motor a připojil baterku. Pomom záleží co máš za výrobce a najít k nim manuál jak programovat a postupovat podle něj. Takhle nastavit každý vzlášť. Tak i zjistíš kterým směrem se točí aby sis mohl nasavit správnou rotaci.
Můj typ: špatně zapojené napájení do regulátorů. Pokud si přepoloval je šance že si je odpálil
Protože ti nepípají regly, tak bych hledal problém u nich. Každý regulátor bys měl ještě naučit rozsah plynu tvé vysílačky. Já to dělal tak že jsem si vzal přijímač, ve vysílačce mrknul na kterém kanálu mám plyn a do toho zapojil regulátor připojený na motor a připojil baterku. Pomom záleží co máš za výrobce a najít k nim manuál jak programovat a postupovat podle něj. Takhle nastavit každý vzlášť. Tak i zjistíš kterým směrem se točí aby sis mohl nasavit správnou rotaci.
Můj typ: špatně zapojené napájení do regulátorů. Pokud si přepoloval je šance že si je odpálil
T9x Open9x, Beta 1400 v3, F4F Wildcat PZ, X525 + Crius MultiWii SE, A10 50mm EDF
Himoto Zenit MT
Himoto Zenit MT
Re: Projekt "Nemo" - Stavba quadcoptery
Aragor
Senzory reagují, kompas a ten druhý senzor reagují až v extrému - když je quad nahnutý úplně na stranu atd, není tam žádný plynulý pohyb. Pokud regulátor připojím, tak se roztočí.
rety:
neodpálil jsem je. Všechny fungují - pokud je napojím "na přímo".
Senzory reagují, kompas a ten druhý senzor reagují až v extrému - když je quad nahnutý úplně na stranu atd, není tam žádný plynulý pohyb. Pokud regulátor připojím, tak se roztočí.
rety:
neodpálil jsem je. Všechny fungují - pokud je napojím "na přímo".
Re: Projekt "Nemo" - Stavba quadcoptery
jakub.cr píše:Aragor
Senzory reagují, kompas a ten druhý senzor reagují až v extrému - když je quad nahnutý úplně na stranu atd, není tam žádný plynulý pohyb. Pokud regulátor připojím, tak se roztočí.
rety:
neodpálil jsem je. Všechny fungují - pokud je napojím "na přímo".
tam je toho víc co by se mělo udělat, EPA na 125% u všech 4 kanálů na vysílačce.
Zkus připojit desku k PC a mít připojený příjmač i baterkou... jestli všechny kanály reagují na vysílačku jak mají...
Ale to neřeší, že regly nezapípají po připojení baterky grrr
EDIT: Sice jsem udělal test na jinem reglu ale mělo by to byt stejne: Pokuď regl nemá signál z příjmače.. tak se nezapne, nebude pípat
Taranis SE, Optic 6 Assan, Toro900, MAXI SWIFT, FW-190, PZ BF-109
Re: Projekt "Nemo" - Stavba quadcoptery
Možná se zeptám blbě, ale co si desky narval za SW? Nebo si nechal původní? Mě to třeba přijde že tam máš blbě nastavené senzory. Dělal si s tím vůbec něco?
Chápu to tak že když máš serulátory zapojené do desky, tak po zapojení baterky nic, ale když je zapojíš na tvrdo na přijímač, tak s baterkou normálně zapípají jo?
Chápu to tak že když máš serulátory zapojené do desky, tak po zapojení baterky nic, ale když je zapojíš na tvrdo na přijímač, tak s baterkou normálně zapípají jo?
T9x Open9x, Beta 1400 v3, F4F Wildcat PZ, X525 + Crius MultiWii SE, A10 50mm EDF
Himoto Zenit MT
Himoto Zenit MT
Re: Projekt "Nemo" - Stavba quadcoptery
rety:
to já se spíš ptám blbě . Jinak s deskou jsem nic nedělal. Nic jsem s ní nedělal. Pro jistotu jsem z desky vypojil všechny regulátory, hezky po jednom jsem je napojil na přijímač a běží, pípnou a je možné roztočit motor.
. Jinak s deskou jsem nic nedělal. Nic jsem s ní nedělal. Pro jistotu jsem z desky vypojil všechny regulátory, hezky po jednom jsem je napojil na přijímač a běží, pípnou a je možné roztočit motor.
Pokud zapojím regulátory, tak jediný který pípne je na pinu D3.
Aragor:
všechny kanály se hýbou když hýbu páčkama.
to já se spíš ptám blbě
Pokud zapojím regulátory, tak jediný který pípne je na pinu D3.
Aragor:
všechny kanály se hýbou když hýbu páčkama.
Re: Projekt "Nemo" - Stavba quadcoptery
Po připojení desky, píše ti to v PC nastavení QuadCopter X? Si myslím že do těch reglů prostě nejde signál.. proto nepípají.
Když, ale připojim mojeho komára k baterce bez zaplé vysílačky, tak stějne regly pípají...
Jo a desku napájíš doufám jen z jednoho regulátoru ?
Když, ale připojim mojeho komára k baterce bez zaplé vysílačky, tak stějne regly pípají...
Jo a desku napájíš doufám jen z jednoho regulátoru ?
Taranis SE, Optic 6 Assan, Toro900, MAXI SWIFT, FW-190, PZ BF-109
Re: Projekt "Nemo" - Stavba quadcoptery
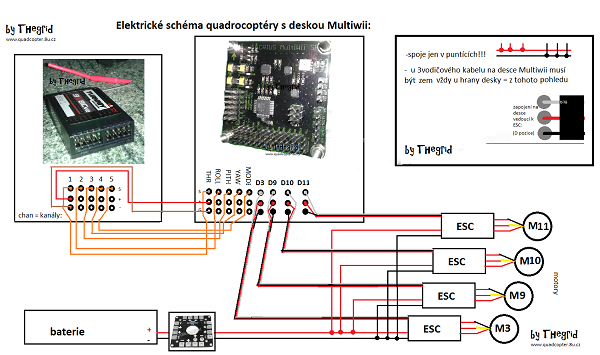
Regulátory mám zapojené přesně jako jsou zde http://www.quadcopter.8u.cz/schema_multiwii_small.png
Tzn. pokud má D3 tři piny je tam zapojený jeden kablík od regulátoru. Tzn. na desce mám zapojené čtyři kabely od regulátorů.
Tzn. pokud má D3 tři piny je tam zapojený jeden kablík od regulátoru. Tzn. na desce mám zapojené čtyři kabely od regulátorů.

{kind=link}
Re: Projekt "Nemo" - Stavba quadcoptery
jo jenže to neni dobré mít všechny BEC pro napájení desky... já ten prostřední vodič (napájecí +) fiknul u 3. reglů, jenom jeden mi napájí desku... je jedno který.
Co když zapojíš vždycky jenom jeden regulator do desky? Pípají nebo jenom ten v D3 ?
Co když zapojíš vždycky jenom jeden regulator do desky? Pípají nebo jenom ten v D3 ?
Taranis SE, Optic 6 Assan, Toro900, MAXI SWIFT, FW-190, PZ BF-109
Re: Projekt "Nemo" - Stavba quadcoptery
Pípají jen v D3.
Re: Projekt "Nemo" - Stavba quadcoptery
Dle návodu jsem dohrál verzi 1.9 http://www.robson.fr/wp-content/uploads ... -22-12.pdf . Nyní mi na desce stále svítí modrá ledka (ta nesvítila) po připojení baterky všechny regulátory pípnou a jakoby s sebou cuknou - tuším že je to pokrok.. Ale stále se netočí na pokyn vysílačky.. 
Re: Projekt "Nemo" - Stavba quadcoptery
Tak už to máš dobře, aspoň myslím. Nevím jak to máš ty, ale pokud máš na vysílačce Mod 1 - plyn v pravo. Tak dej plyn na minimum a levou páku prostě doprava a počkej tak 2 vteřiny. Měly by se odblokovat motory. Zablokuješ je na druhou stranu. Pokud tam máš vrtule, tak je sundej!
A jen otázka, když sis tam nahrával tu 1.9 přes Arduino. Nastavoval sis v Config.h typ koptéry, čidla, typ desky atd. ? To máš vše dobře?
A jen otázka, když sis tam nahrával tu 1.9 přes Arduino. Nastavoval sis v Config.h typ koptéry, čidla, typ desky atd. ? To máš vše dobře?
T9x Open9x, Beta 1400 v3, F4F Wildcat PZ, X525 + Crius MultiWii SE, A10 50mm EDF
Himoto Zenit MT
Himoto Zenit MT
Re: Projekt "Nemo" - Stavba quadcoptery
Aha, tak proto mi najednou v programu nejdou čidla.. Mohu poprosit o radu co vše mám upravit?
Díky
Díky